
 ВњЦЗ:21
ВњЦЗ:21
 СЊЯЕЮвУЧ
СЊЯЕЮвУЧ

зЂЃКБОЮФеТЮФзжЃЌЭМЦЌВПЗжРДздЭјТч
АцШЈЙщдзїепЃЌЧжЩОЁЃ
ЙЄВЉЪППЩвдМЏГЩFANUCЃЌYaskawaЃЌABBЃЌKUKAКЭKawasakiЕШжЦдьЩЬЕФЛњЦїШЫЁЃЦОНшЖрФъЕФМЏГЩЛњЦїШЫЕФОбщЃЌЮвУЧЙЋЫОЪЧАяжњФњзіГіУїжЧОМУИпаЇЃЌЕФНтОіЗНАИЕФУїжЧбЁдёЕФОјМббЁдёЁЃ
ЁЁЛњЦїШЫдЫгУгкЛњДВЁЂзЂЫмЛњЛђЦфЫћЩшБИШЁЗХМўКЭЙЄвеМгЙЄЪБЃЌЖМвдБЃЛЄИїЗНЩшБИАВШЋЕФЧАЬсЯТНјааЩњВњЃЌКЯРэЕФЩшжУИЩЩцЧјЙІФмВЂМЄЛюКѓЃЌПЩвдЬсИпЛњЦїШЫКЭМгЙЄЩшБИМфСЊЖЏзївЕЪБЕФАВШЋадФмЁЃ
ЁЁЁЁЩшжУЛњЦїШЫЕФИЩЩцЧј
ЁЁЁЁвдЛњЦїШЫКЭМгЙЄжааФЩЯЯТСЯЮЊР§ЃЌЫЕУїИЩЩцЧјЕФЩшжУВНжшЁЃ
ЁЁЁЁ1.1ЩшжУВНжш
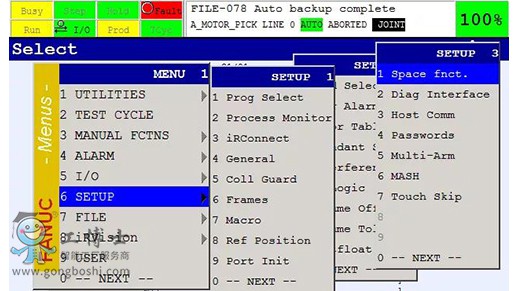
ЁЁЁЁЪОНЬЦїЩЯЕуЛї“MENU”→“SETUP”→“Space fnct”ЃЌНјШыИЩЩцЧјЛУцЁЃ
бЁдёЮДБЛЪЙгУЕФИЩЩцЧјЃЌАДЯТЪОНЬЦї“F3 DETAIL”,НјШыИЩЩцЧјЩшжУЛУц

дкИЩЩцЧјЩшжУЛУцРяЃЌЬюШызЂЪЭЃЌЯрЙиЕФЪфШыЪфГіаХКХЃЌАДЯТ“F2 ПеМф”

НјШыИЩЩцЧјПеМфЩшжУЛУцЃЌНЋЛњЦїШЫдЫЖЏЕНКЯЪЪЕФИЩЩцЧјЦ№ЕуЃЌ“SHIFT+F5 RECORD”МЧТМЯТЕБЧАЕФЙЄОпзјБъжааФЃЌвдЕБЧАЙЄОпжааФЮЊЦ№ЕуЃЌЬюШыЕБЧАЕФгУЛЇзјБъЯЕЕФXYZЗНЯђбгЩьЕФОрРыЃЌаЮГЩвЛИіПеМфЁЃ

АДЯТ“prev”ЗЕЛиИЩЩцЧјЩшжУЛУцЃЌАДЯТ“F4 МЄЛю”ЃЌМЄЛюЕБЧАИЩЩцЧјЃЌЭъГЩЩшжУЁЃ
ЁЁ2.2 зЂвтЪТЯю
ЁЁЁЁМгЙЄжааФТфЮЛКЭЛњЦїШЫЕФЪРНчзјБъВЛЦНааЃЌГЪвЛЖЈЕФНЧЖШЪБЃЌПЩвдзіКУМгЙЄжааФЕФгУЛЇзјБъКѓдкЩшжУИЩЩцЧјЕФПеМфЃЌДЫЪБИЩЩцЧјПеМфКЭЛњЦїШЫвВПЩвдГЪЯжвЛЖЈНЧЖШЁЃ
ЁЁЁЁ3 ЙІФмзмНс
ЁЁЁЁЩшжУИЩЩцЧјЪБЃЌашвЊУїШЗЕБЧАЕФЙЄОпжааФКЭдЫааГЬађжаЕФЙЄОпжааФЃЌШчЙћвдЗЈРМжааФЮЊЙЄОпжааФЃЌдђашвЊСєГіЪжзЅГЄЖШКЭЩшБИжЎМфЕФОрРыЃЌБмУтЗЈРМжааФдкИЩЩцЧјЭтЃЌЖјЗЈРМЩЯЕФЪжзЅвбОНјШыИЩЩцЧјЃЌдьГЩХізВЁЃдке§ГЃЕФЧщПіЯТЃЌЛњЦїШЫЪфГіЕФИЩЩцЧјаХКХПЊКЭЙиЭъШЋгЩЙЄОпжааФЮЛжУРДОіЖЈЃЌВЛЛсБЛЪжЖЏЧПжЦПЊКЭЙиЃЌдьГЩЮѓВйзїЁЃдкДЫДІСЊЯЕЮвУЧЛђжТЕчгыЮвУЧСЊЯЕЃЌвдЛёШЁгаЙиABBЛњЦїШЫХфМўКЭНтОіЗНАИЕФПьЫйМђБуЕФБЈМлЁЃ
СЫНтИќЖрFANUCЛњЦїШЫПижЦЙёЃЌFANUCЛњЦїШЫЮЌаоЃЌЧызЩбЏЃКFANUCЛњЦїШЫХфМў
- ЯТвЛЦЊЃКЗЂФЧПЦЛњЦїШЫМФДцЦїжИСюШчКЮЪЙгУ
- ЩЯвЛЦЊЃКЗЂФЧПЦЛњЦїШЫГЬађБрКХХХађ