
 产品:21
产品:21
 联系我们
联系我们

Fanuc机器人控制柜的启动步骤
版权归原作者,侵删。
Fanuc 机器人控制装置有四种启动方式(启动方式)。
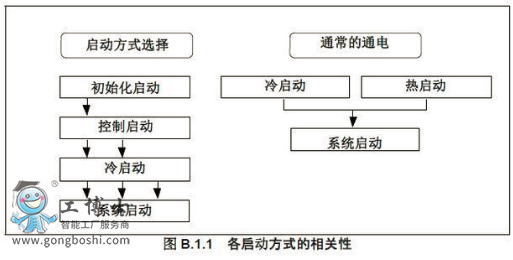
1.初始化启动:当执行初始化时,所有程序都会被删除,所有设置都会返回标准值。初始化启动完成后,控制启动自动执行..
2.控制启动:开始执行控制,控制系统启动引导菜单那么简单。虽然我们不能开始通过控制机器人进行操作,但可以读出更改系统变量总是可能的文件系统来改变机器人等操作的设置。从辅助菜单控制的开始菜单中可以选择冷启动。
3.冷启动: 冷启动是一种启动方式,用于在断电处理不起作用时执行通常的开机操作。 程序的执行状态变为“结束”状态,输出信号完全断开。 冷启动完成后,机器人就可以操作了。
即使停电时也可以执行冷启动。
4.热启动:当电源故障处理有效期间使用电源接通操作启动模式通常进行热启动。和程序执行模型的输出状态,当电源被关断的保持状态被激活。当热启动完毕后,你可以操作机器人。
日常运营,利用冷或热启动。使用哪一个,与电源时的有效/无效而无法处理。
初始化启动和控制启动,维护期间使用..这些初创企业不用于日常运营..