
 ВњЦЗ:21
ВњЦЗ:21
 СЊЯЕЮвУЧ
СЊЯЕЮвУЧ

ЗЂФЧПЦЛњЦїШЫЗРХізВМьВтАќ
зЂЃКБОЮФеТЮФзжЃЌЭМЦЌВПЗжРДздЭјТч
АцШЈЙщдзїепЃЌЧжЩОЁЃ
ЙЄВЉЪППЩвдМЏГЩFANUCЃЌYaskawaЃЌABBЃЌKUKAКЭKawasakiЕШжЦдьЩЬЕФЛњЦїШЫЁЃЦОНшЖрФъЕФМЏГЩЛњЦїШЫЕФОбщЃЌЮвУЧЙЋЫОЪЧАяжњФњзіГіУїжЧОМУИпаЇЃЌЕФНтОіЗНАИЕФУїжЧбЁдёЕФОјМббЁдёЁЃ
1.1 ЛњЦїШЫвЊЧѓ
дкR-30iBЛњЦїШЫПижЦЙёЕФзМБИЪЙгУДЫЙІФмЃЌФњашвЊАВзАПЩбЁШэМўАќЃК
J684 high sensitivity collision detection package
J878 payload and payload setup confirmation
ЁЁЁЁ1.2 жївЊЙІФм
ИпСщУєЖШЃЌЦфАќРЈХізВМьВтЗжзщХізВМьВтвдИпСщУєЖШКЭИКдиЕФЦРМлКЏЪ§ЁЃЕБгыЙЄМўАбГжЛђЛњЦїШЫХізВПЩвдМьВтХізВЃЌВЂЭЃжЙЫљЪіЛњЦїШЫЁЃФуПЩвд*ДѓЯоЖШЕиМѕЩйХізВЫ№ЛЕКЭАбЮеЛњЦїШЫЁЃ
ЁЁЁЁ1.3 ЯрЙиЪжВс
Fanuc r-30ib controller options function operation manual (b-83284en-2-u 04) high sensitivity collision detection software package
ЁЁЁЁ2 ЙІФмЫЕУї
ЁЁЁЁ2.1 ЩшжУ
ИпСщУєЖШХізВМьВтЙІФмЕФЪЙгУЪзЯШашвЊЩшЖЈзІдиКЩКЭАВзАдкЛњЦїШЫЩЯЕФзАжУЕФаХЯЂЁЃгЩгкИУЙІФмашвЊЪЙгУаХЯЂЧјгђРДМьВтЪЙгУАВзАдкЛњЦїШЫЩЯЕФзАжУЕФХізВ,
2.2ЩшжУХізВМьВт
вЛЁЃАДЯТ“ВЫЕЅ”АДХЅЃЌЩшжУжаЕФ“coll guard”бЁЯюНЋЯдЪОШчЯТ
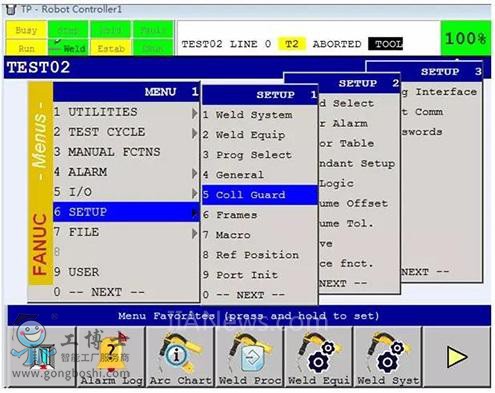
ЁЁ2. ЩшжУХізВМьВтЃК
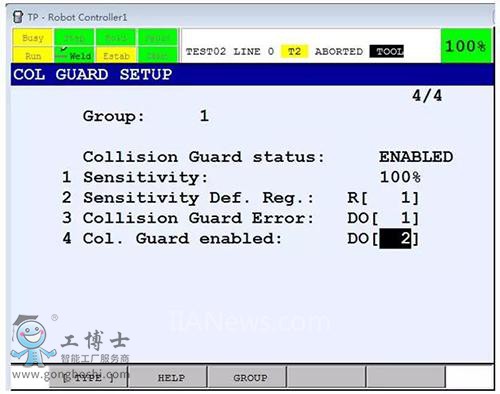
НЋХізВБЃЛЄзДЬЌГхЭЛМьВтзДЬЌЩшжУЮЊЦєгУвдНјааХізВМьВтЁЃ
СщУєЖШХізВМьВтСщУєЖШЃЌЩшЖЈЕФ1ЃЅжС200ЃЅЕФЗЖЮЇФкЃЌФЌШЯЩшжУЮЊ100ЃЅЃЌНЯДѓЕФАйЗжБШжЕГхЛїМьВтИќУєИаЁЃдіМгАйЗжБШжЕЃЌБивЊЪБЃЌвддіМгХізВЕФМьВтСщУєЖШ;дкашвЊМѕаЁЮѓВюжЕБЈОЏМѕЩйАйЗжБШЁЃ
СщУєЖШЖЈвхЁЃЙцдђЁЃСщУєЖШБЃЛЄМФДцЦїЁЃЪЙгУСщУєЖШБЃЛЄМФДцЦїжаЩшжУЕФЦЋвЦжЕЃЌЕїећЦЋвЦДѓаЁвдМѕЩйХізВЁЃ
ХізВБЃЛЄДэЮѓХізВМьВтДэЮѓЃЌЪЙгУDOЯдЪОХізВМьВтБЈОЏаХЯЂЁЃ
ХізВБЃЛЄЦєгУХізВМьВтЪЙФмЖЫЃЌЪЙгУХізВМьВтDOЯдЪОБЛНгЭЈЁЃ
ЁЁЁЁзЂвтЪТЯюЃК
1ЃЉЕБХізВМьВтСщУєЖШАйЗжБШаЁгк100%ЪБЃЌХізВМьВтЙІФмНЋВЛФме§ГЃгааЇЕиЙЄзїЁЃ
2)ШчЙћЛњЦїШЫВЛЖЯЕиЮќЪеХізВСІЃЌНЋНЕЕЭЛњЦїШЫЕФЪЙгУЪйУќЁЃ
2.3ХізВМьВтКЭХізВЕїећПЊЙи
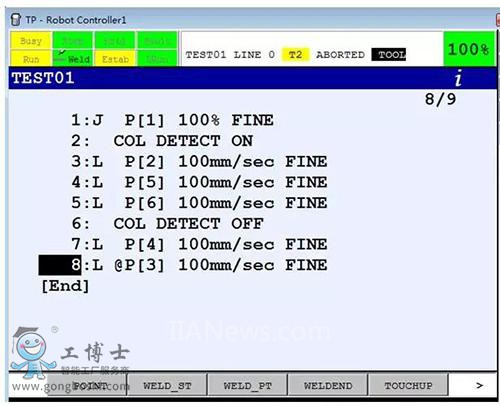
вЛЁЃcol detect onКЭcol detect offУќСюПЩгУгкЩшжУХізВМьВтЕФДђПЊКЭЙиБеЁЃШчЯТЭМЫљЪОЃЌПЩвдДђПЊtest01жа3КХЯпЕН5КХЯпЕФХізВМьВтГЬађНјааХізВМьВтЃЛЙиБе7КХЯпЕН8КХЯпЕФХізВМьВтГЬађНјааХізВМьВтЁЃ
ЁЁЁЁзЂвтЪТЯюЃК
1)ЕБИпСщУєЖШХізВМьВтЙІФмЙиБеЪБЃЌ*ЛљБОЕФХізВМьВтЙІФмвВЙиБеЁЃвђДЫЃЌЕБЙиБеИпСщУєЖШХізВМьВтЙІФмЪБЃЌашвЊОЁПЩФмЕиМѕаЁЛњЦїШЫЕФдЫЖЏЧјгђЃЌвдБмУтЛњЦїШЫЕФВЛПЩдЄВтЕФХізВЫ№ЩЫЁЃ
2ЃЉИпСщУєЖШХізВМьВтДђПЊКЭЙиБедЫЖЏБЛЪЉМгЕНЪЙгУИУУќСюЕФзщЁЃ
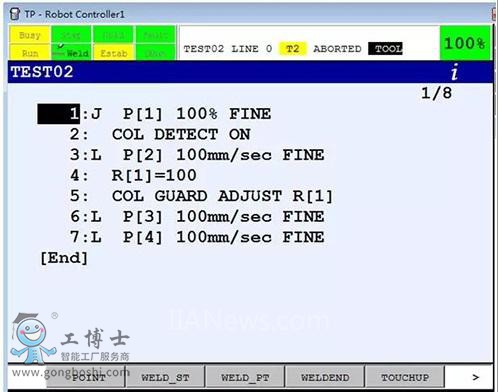
2ЁЃЭЈЙ§ЪЙгУcol detect adjustжИСюЃЌПЩвдЭЈЙ§дЄЩшЕФСщУєЖШБЃЛЄМФДцЦїЩшжУжЕRЁО1ЁПРДЕїећЛњЦїШЫЪжБлзЫЬЌвдМѕЩйХізВЁЃR[1]жЕЕФДѓаЁБэЪОЕїећСПЕФДѓаЁЁЃдкЯТЭМЫљЪОЕФTEST02ГЬађжаЃЌЕк6жС7ааЪЙгУХізВЕїећРДМѕЩйЛђБмУтЛњЦїШЫгыЙЄМўжЎМфЕФХізВЁЃ
ЁЁЁЁзЂвтЪТЯюЃК
1)ШчЙћдкЛњЦїШЫЯЕЭГжаЪЙгУШэИЁЖЏЛђЛњЦїШЫНЋжЦЖЏЦїБЃГжДђПЊЛђЮДЩшжУаЃзМЃЌдђВЛФмЪЙгУИпСщУєЖШХізВМьВтЙІФмЁЃ
2ЃЉШчЙћИККЩГЌЙ§ЛњЦїШЫЕФЖюЖЈИКдиЃЌЪЙгУХізВЖМЛсЦЋВюЕФИпСщУєЖШМьВтЕФЁЃ
3ЃКЙІФмзмНс
ИпСщУєЖШЕФХізВМьВтАќФмгааЇМьВтЛњЦїШЫЛђЪжБњгыЙЄМўЕФХізВЃЌ*ДѓЯоЖШЕиМѕаЁЛњЦїШЫгыЪжБњЕФХізВЫ№ЩЫЁЃЫќЭЈГЃгыХізВздЖЏЛжИДЙІФмНсКЯЪЙгУЁЃ
дкДЫДІСЊЯЕЮвУЧЛђжТЕчгыЮвУЧСЊЯЕЃЌвдЛёШЁгаЙиABBЛњЦїШЫХфМўКЭНтОіЗНАИЕФПьЫйМђБуЕФБЈМлЁЃ
СЫНтИќЖрFANUCЛњЦїШЫПижЦЙёЃЌFANUCЛњЦїШЫЮЌаоЃЌЧызЩбЏЃКFANUCЛњЦїШЫХфМў
- ЯТвЛЦЊЃКЗЂФЧПЦЛњЦїШЫГЬађБрКХХХађ
- ЩЯвЛЦЊЃКЗЂФЧПЦЛњЦїШЫЮЛжУаХЯЂаоИФ