
 产品:21
产品:21
 联系我们
联系我们

发那科机器人视觉线跟踪系统配置
版权归原作者,侵删。
工博士可以集成FANUC,Yaskawa,ABB,KUKA和Kawasaki等制造商的机器人。凭借多年的集成机器人的经验,我们公司是帮助您做出明智经济高效,的解决方案的明智选择的绝佳选择。
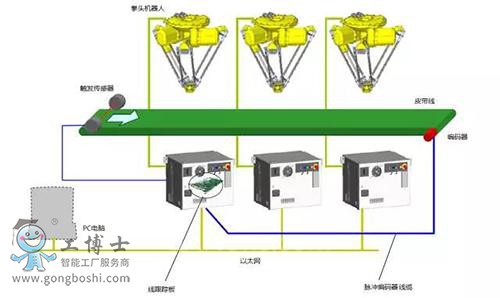
一个典型的视觉线跟踪系统通常由以下硬件组成:
● 机器人控制柜
● 机器人
● 线跟踪板(安装在机器人控制柜内)
● 滚道线或皮带线
● 传感器(作为触发传感器,用于辅助相机拍照)
● 相机
● 相机镜头
● 相机电缆
● 视觉光源
● 编码器
● 编码器线缆
● 脉冲多路复用器,即Pulse multiplexer 。当需要用到多台机器人,并且机器人相互之
● 间不是通过以太网传递脉冲数据时,需要使用。
● 以太网通讯电缆
● 以太网集线器
下图为一个典型的视觉线跟踪系统示意图:
在实际应用过程中,须考虑视觉线跟踪系统精度的要求。一般来说,其精度受如下诸多因素的影响。
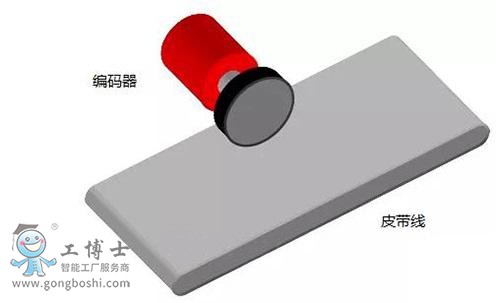
1. 编码器。编码器型号、安装方式将会影响系统跟踪的精度。通常来说,编码器安装有两种方式:编码器接触皮带线安装,编码器连接驱动或从动轴安装。相比较而言,编码器接触皮带线安装的方式较好,如下图所示:
2. 传送带。传送带的速度以及其运行的稳定性将会影响系统跟踪的精度。通常来说,传送带运行的速度越低,机器人跟踪精度以及视觉识别精度越高。因此,通过增加产品在传送带上的分布密度,可降低传送带的运行速度,从而达到提高精度的目的。


3. 视觉光源。光源的型号、安装的位置以及照射的角度将会影响视觉识别精度,从而影响系统跟踪精度。总的来说,对视觉光源的要求是:在保证准确识别的前提下,提供持续充足的光源以降低曝光时间,提高视觉识别精度。理论曝光时间可通过如下公式计算,再根据实际情况调整:
E≦⊿/V
其中,E为曝光时间,⊿为精度要求,V为传送带速度。
4. 其它因素。这些因素将会在一定程度上影响系统精度,因此在应用过程中,应尽量提高其准确性。
● 机器人TCP的创建
● 跟踪坐标,示教参考位置创建
● 触发传感器灵敏度
● 机器人之间通讯流畅
● 机器人控制柜
● 机器人
● 线跟踪板(安装在机器人控制柜内)
● 滚道线或皮带线
● 传感器(作为触发传感器,用于辅助相机拍照)
● 相机
● 相机镜头
● 相机电缆
● 视觉光源
● 编码器
● 编码器线缆
● 脉冲多路复用器,即Pulse multiplexer 。当需要用到多台机器人,并且机器人相互之
● 间不是通过以太网传递脉冲数据时,需要使用。
● 以太网通讯电缆
● 以太网集线器
下图为一个典型的视觉线跟踪系统示意图:
在实际应用过程中,须考虑视觉线跟踪系统精度的要求。一般来说,其精度受如下诸多因素的影响。
1. 编码器。编码器型号、安装方式将会影响系统跟踪的精度。通常来说,编码器安装有两种方式:编码器接触皮带线安装,编码器连接驱动或从动轴安装。相比较而言,编码器接触皮带线安装的方式较好,如下图所示:
2. 传送带。传送带的速度以及其运行的稳定性将会影响系统跟踪的精度。通常来说,传送带运行的速度越低,机器人跟踪精度以及视觉识别精度越高。因此,通过增加产品在传送带上的分布密度,可降低传送带的运行速度,从而达到提高精度的目的。
3. 视觉光源。光源的型号、安装的位置以及照射的角度将会影响视觉识别精度,从而影响系统跟踪精度。总的来说,对视觉光源的要求是:在保证准确识别的前提下,提供持续充足的光源以降低曝光时间,提高视觉识别精度。理论曝光时间可通过如下公式计算,再根据实际情况调整:
E≦⊿/V
其中,E为曝光时间,⊿为精度要求,V为传送带速度。
4. 其它因素。这些因素将会在一定程度上影响系统精度,因此在应用过程中,应尽量提高其准确性。
● 机器人TCP的创建
● 跟踪坐标,示教参考位置创建
● 触发传感器灵敏度
● 机器人之间通讯流畅
在此处联系我们或致电与我们联系,以获取有关ABB机器人配件和解决方案的快速简便的报价。
了解更多FANUC机器人控制柜,FANUC机器人维修,请咨询:FANUC机器人配件
- 下一篇:FANUC机器人报警消除
- 上一篇:发那科机器人的快速启动连接技术